参考hugging face的文档介绍:https://huggingface.co/docs/transformers/perf_train_gpu_many#naive-model-parallelism-vertical-and-pipeline-parallelism,以下介绍聚焦在pytorch的实现上。
随着现在的模型越来越大,训练数据越来越多时,单卡训练要么太慢,要么无法存下整个模型,导致无法训练。当你拥有多张GPU(单机多卡,多机多卡)时,你就可以通过一些并行训练的方式来解决你的问题。常见的并行方法有以下四种:
数据并行(DP):每个GPU都加载全量模型参数,将数据分割成多块输入到每个GPU中单独处理,但在计算loss和梯度时会有同步机制。
模型张量并行(TP):每个tensor被分割成多块(根据场景按行或者列分割)存储在不同的GPU上,每个GPU单独计算,最后同步汇总到一块,类似于transformer中的多头,假如每个头的计算都在一张单独的gpu上,计算完后将所有gpu的结果concat到一起再分发到每张gpu上。
流水线并行(PP):将模型按照层拆分,不同的层存储在不同的gpu上,类似于流水线的形式,数据先进入到前面的层,输出结果传到其他GPU上进入到后面的层。反传同理。
ZeRO:属于数据并行的范畴,但又很不一样,在ZeRO中会将模型参数、优化器参数、梯度等分片到不同的GPU上,ZeRO的方法可以配合张量并行或者流水线并行一起使用,但在配合TP或者PP时,通常只启用优化器参数的分片,其他的分片可能会带来不好的效果。此外ZeRO-offload还可以将一些计算量小且使用低频的参数放置在CPU上,比如优化器参数和参数更新的计算,或者混合精度训练时,fp32的参数,这些都可以放在CPU上,在不明显影响计算效果的同时,节约GPU显存。
数据并行
数据并行最常见的是DP(Data Parallel)和DDP(Distributed Data Parallel),DP和DDP的不同在于:
1)DP是基于多线程实现的,DDP是基于多进程实现的,每个GPU受单独的进程控制,不受GIL锁的限制。
2)DP只能在单机上使用,DDP单机和多机都可以使用。
3)DDP相比于DP训练速度要快,但并不绝对,有些场景下当GPU的通讯效率低时可能会更慢。
4)DP存在多次数据交换,DDP只存在一次梯度交换,且是通过GPU之间相互交换的方式融合所有的数据。
ZeRO数据并行
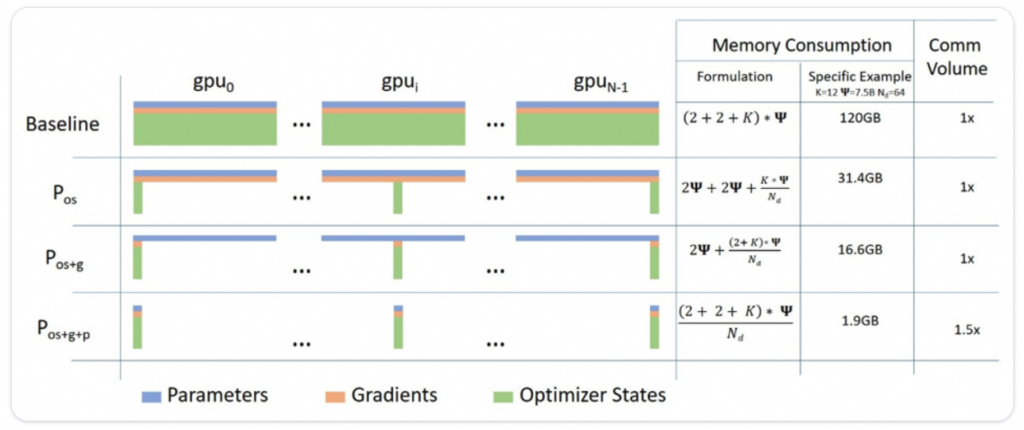
如上图所示,Baseline是指每张GPU都存储所有的参数,包括模型权重、梯度、优化器状态,除此之外其实还有激活层、临时存储,不可用的内存碎片等。
Pos:优化器状态分片
Pos+g:优化器状态和梯度分片
Pos+g+p:优化器状态、梯度和权重参数分片。
ZeRO相比于DP来说,主要在于各种参数分布在不同的GPU上,当在运行计算时,每个GPU会去同步完整的参数去计算。假如给定一个3层的模型,每层有3个参数:
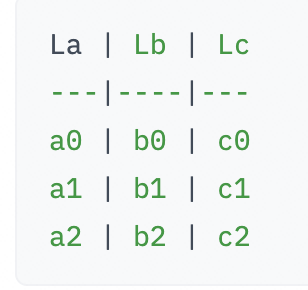
给定3个GPU去分片存储不同的权重块:
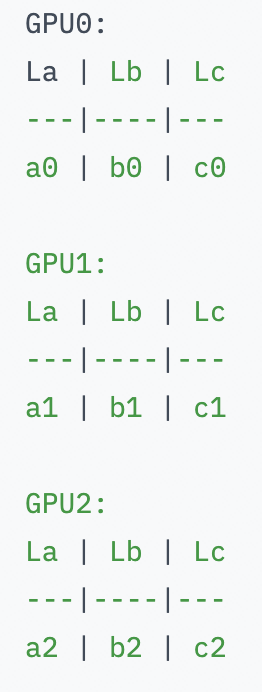
给定输入当到达La层时,在GPU0上只有a0参数,此时GPU0会从GPU1和GPU2上同步a1和a2组合成完整的参数进行计算,计算完后就释放参数,对于GPU1和GPU2同理。所以这里和张量并行是不太一样的,这里会同步全量的参数。
流水线并行
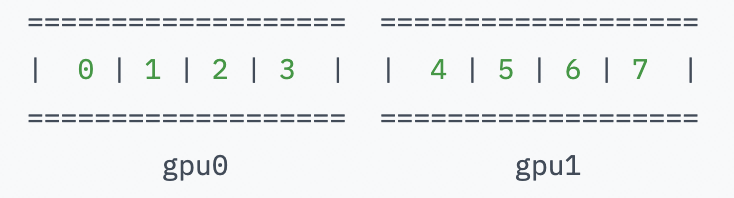
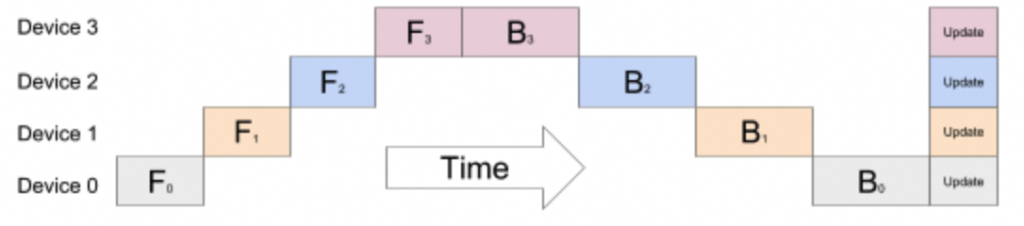
流水线并行是将模型按层拆分存储到不同的GPU上,假定给定一个8层的模型和2个GPU,如下所示:前4层在GPU0上,后4层在GPU1上,在前向计算过程中先在GPU0上计算,然后将GPU0上的输出同步到GPU1上计算。反向传播同理。
流水线并行的方式存在一个问题,后面层需要等前面的计算完才能开始计算,会导致GPU在一段时间是闲置的,如下图所示:
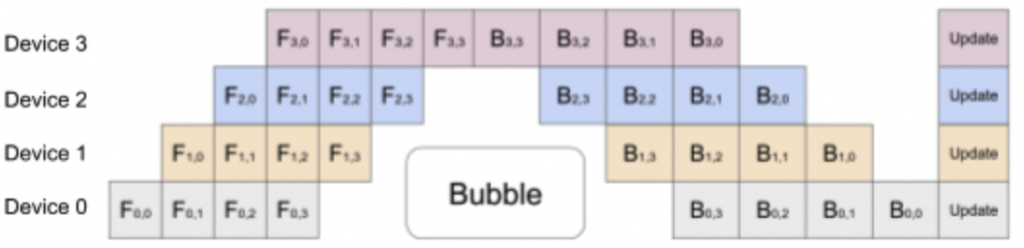
为了让GPU的闲置时间减少,在流水线并行的思路上引入数据并行,将原来的mini batch分割成更小的macro batch,让整个训练如下图所示:
张量并行
张量并行是将一个完整的tensor分割成多块存储到不同的GPU上,流水线并行解决不了一个GPU无法存储一个模型layer的情况,而张量并行可以解决这类问题。详见Megatron-LM的论文。
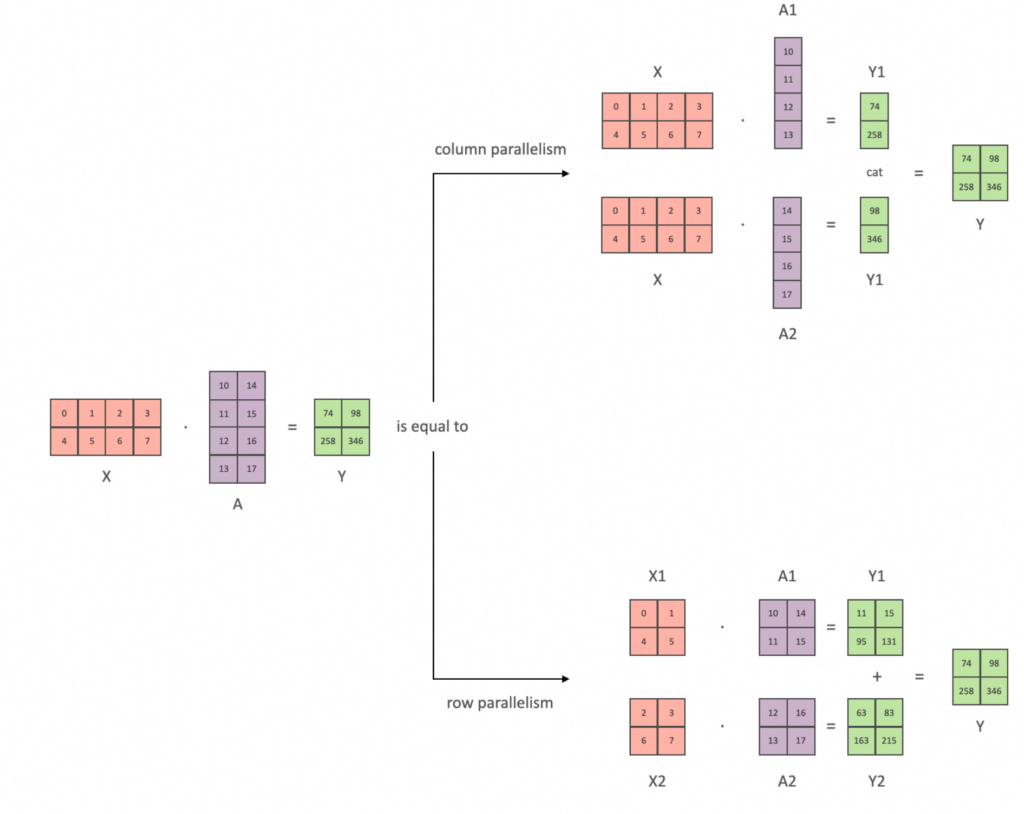
在transformer架构中主要是有线性层和GeLU一类的激活函数组成,对模型的权重按照行或者列分块时,线性矩阵运算如下:按照列拆分权重时,输入不需要拆分,最终通过concat组合结果;按行拆分权重时,输入也需要拆分,最终通过相加组合结果。从这里的特性也可以知道,假定一个函数为GeLU(XA)B,对于激活函数里面的A按列拆分可以在单个GPU中完成激活计算,此时对应的B可以按行计算,以上所有操作都可以只在各自的GPU中完成,较少通信操作,最后才同步合并结果。
适用场景
单GPU
当模型可以存储在单GPU上:正常训练;
当模型不能存储在单GPU上:可以使用ZeRO-Offload CPU等方法,让CPU去承载部分参数。
单机多GPU
当模型可以存储在单GPU上:DDP(推荐),ZeRO(可能会提效);
当模型不能存储在单GPU上:PP,ZeRO,TP。但最大层无法放在单GPU上时,就只能使用TP、ZeRO。
多机多GPU
当节点间通讯比较快时:ZeRO,PP+TP+DP;
当节点间通讯比较慢时:DP+TP+PP+ZeRO-1(ZeRO-1是指只对优化器参数做分片)。
参考资料: